一、混合交通流与道路设施的适应性及其基本规律揭示
1、高水平论文
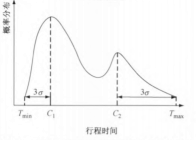
杨帆,杨晓光,云美萍.城市道路间断流行程时间双峰分布[J].同济大学学报(自然科学版), 2014, 42(2):259-265.
摘要:在传统行程时间单一概率分布研究基础上,提出了城市间断流行程时 间概率分布模型.以正态分布和对数正态分布为典型分布,提出了6种不同的双峰概率分布函数,并利用最小二乘法和Frank-Wolfe算法进行建模和参数 拟合.研究结果表明,双峰概率分布函数能够很好地拟合并反映城市道路间断流行程时间概率分布特征,突显其与连续流单一概率分布之间的差异性.研究结果为城 市路网路径选择问题提供新的路段阻抗确定方法,也能够为交通分配提供新的路段行程时间概率函数.
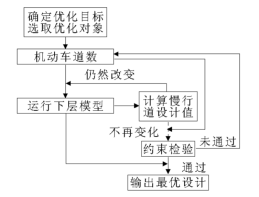
胡文婷,陈峻,王炜.城市多模式道路网设计方法——模型、算法和应用[J].交通信息与安全, 2015(2):20-25.
摘要:为实现城市多模式道路优化,通过分析我国城市混行交通的特性,建立双层模型,对城市机动车道、自行车道、人行道进行整体设计。上层模型以各类车道数为设计变量,定义城市道路交通效率的3个指标,作为优化目标。下层模型将同时决策组合模型推广到混行交通,进行需求预测,并根据预测流量返算设计变量。设计3种启发式算法和对角化算法分别求解上下层模型,将该方法应用于淮北市的路网规划。对3个目标值各进行10次试算来检验算法,粒子群算法计算花费和解值最小;下层模型的拟合度达0.659,优于假设独立交通的拟合度0.375;优化后的路网可以合理解释不同优化目标,说明了文中方法的实用性。
2、奖项
奖项:上海市科学技术奖-2011年
获奖项目名称:复杂条件下城市道路交通设计理论与关键技术及其应用
获奖人:杨晓光
获奖等级:三等奖
3、专利与软著
软件全称:平面交叉口交通设计辅助软件V1.0
登记号:2015SR044228
著作权人:上海济安交通工程咨询有限公司
4、标准规范
地方标准:上海市工程建设规范:城市道路平面交叉口规划与设计规程
标准编号:DGJ08-96-2013
参与人:杨晓光; 白玉
地方标准:城市道路交叉口规划规范
标准编号:GB50647-2011
参与人:杨晓光; 白玉
5、著作
著作名称:城市道路交通设计指南
著者:杨晓光
出版单位:人民交通出版社
国际标准书号:ISBN:9787114046898
著作封面图片:
二、畸形及环形交叉口优化设计和控制技术整合方法
1.高水平论文
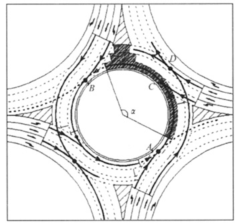
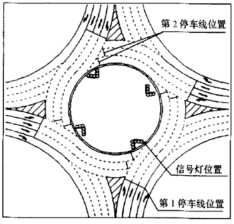
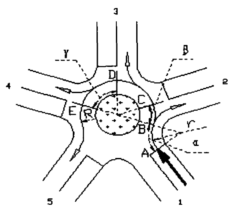
马莹莹,杨晓光,曾滢.十字环形交叉口绿灯间隔时间计算方法研究[J].公路交通科技, 2007, 24(7):95-98.
摘要:以十字环形交叉口内部各股车流的潜在冲突点和车辆启动形成的启动波为依据,将环形交叉口左转二次控制的绿灯间隔时间转化为环道左转与本相直行之间的绿灯间隔时间、环道左转与下一相位绿灯启亮时差以及两直行相位绿灯间隔时间的组合,提出各个绿灯启亮的时间差以及绿灯间隔时间的计算方法,并将该方法应用于实例计算。论文的研究成果对提高十字环形交叉口左转二次控制效率和提高交叉口运行的安全性具有重要的意义和实用价值。
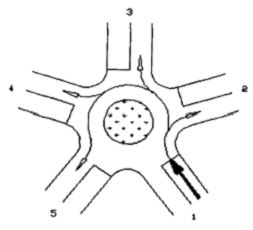
高云峰,杨晓光,伍速锋, et al.五叉环形交叉口信号协调控制模型[J].系统工程, 2006, 24(8):27-31.
摘要:对五叉环形交叉口的信号控制方法进行了研究,给出了基于环道容量约束的信号控制参数优化的模型,模型着重考虑了两个因素:环道容量约束,进口道灯、环道灯相互之间的绿信号协调、红信号协调。利用本文提出的控制模型设计了一个实例的信号控制方案,并通过V ISS IM仿真评价了该信号控制方案,验证了本文提出的控制方法的有效性。
2.专利与软著
专利名称:一种可用于环形交叉口的不对称时空优化控制方法
专利申请号:200810035665.0
发明人:杨晓光、马万经、沈峰
3.著作
著作名称:交通设计
著者:杨晓光、白玉、马万经、邵海鹏
出版单位:人民交通出版社
国际标准书号:ISBN: 9787114085697
著作封面图片:
三、信号控制交叉口群交通阻塞机理与时空协同优化设计方法
1.高水平论文
赵靖,付晶燕,杨晓光.信号控制交叉口动态车道功能优化方法[J].同济大学学报(自然科学版), 2013, 41(7).
摘要:为了应对交叉口交通供需关系发生显著变化的情况,合理分配交叉口空间资源,对信号交叉口动态车道功能优化方法进行研究.基于优化对象、优化参数和优化模型3个方面的分析,建立了以进口组为基础的动态车道功能优化模型.它可由整数非线性规划模型来描述,其优化目标为关键流量比之和最小.通过算例分析,对该方法的优化结果和计算速度进行了检验.研究表明,以进口组为优化对象可在保证优化结果准确性的基础上显著减少须同时进行优化的变量数,提高求解效率,以此为基础建立的优化模型可满足动态控制计算准确性和计算速度的要求.
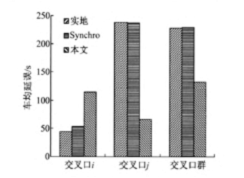
吴伟,马万经,杨晓光.信号控制交叉口左转相位协调设计方法[J].同济大学学报(自然科学版), 2013, 41(1).
摘要:基于左转交通流的路径分析,给出了相邻交叉口左转相位协调优化的约束条件,包括流量守恒、绿灯最大最小时间、饱和度和周期时长等.考虑不同左转相位设置模式,建立了相邻交叉口间通行能力差计算模型.在此基础上,以通行能力差最小为目标,提出了相邻交叉口左转相位协调设计模型.最后,基于两个实际交叉口的几何条件和交通流数据,采用车均延误和最大通过量为指标对比分析了交叉口现有方案、Synchro优化方案和本文模型优化方案的信号控制效益.结果表明,基于本文模型的相位方案,能降低各交叉口间的通行能力差值,并有效降低交叉口群的车均延误,提高交叉口群整体通行能力,同时该协调设计方法对整个系统的负面影响较小.

2.奖项
奖项:教育部科学技术进步奖
获奖项目名称:高密度城市道路网络交通阻塞解析理论与综合改善技术
获奖人:同济大学
获奖等级:二等奖
奖项:上海市科学技术奖
获奖项目名称:面向城市道路交通管理与信息服务的交通状态预测预报关键技术
获奖人:同济大学
获奖等级:二等奖
3.专利与软著
专利名称:一种交叉口动态车道功能控制的实施方法
专利号:ZL201210134256.2
发明人:马万经; 赵靖; 杨晓光
四、主动交通安全设计理论与方法
1.高水平论文
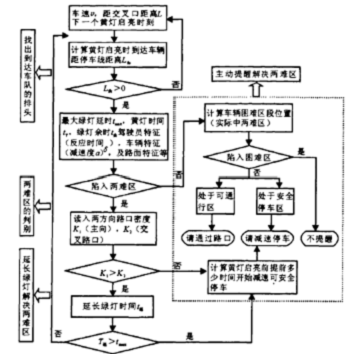
储浩,杨晓光,朱彤, et al.基于智能车路系统的交叉口主动交通安全技术研究[J].交通信息与安全, 2008, 26(4):135-139.
摘要:智能车路系统是通过交通信息资源在车载装置和交通基础设施之间的合理分配和平衡、车辆和道路设施的智能协同和配合来提高交通的安全性和工作效率的。从分析国内外智能交通的发展、对交通安全问题的关注和车载设备的增多等角度出发,认为智能车路系统是作为解决主动交通安全问题的一个有效途径,以解决交叉口"两难区"交通安全为出发点,给出了智能车路系统解决实际主动交通安全的实例。
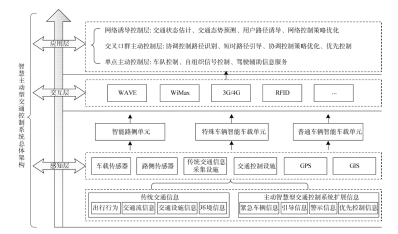
杨晓光,马万经,姚佼, et al.智慧主动型交通控制系统及实验[J].工程研究-跨学科视野中的工程, 2014(1):43-53.
摘要:限于交通信息采集内容及方式、控制实现手段和优化模型性能等因素,传统交通控制系统难以满足实际的交通控制需求。大数据和车联网及车路协同系统等技术的发展,为提升交通控制系统的控制基础与条件、系统适应能力和响应能力创造了前所未有的条件。本文首先分析了信息、数据和计算技术等变革对交通系统运行环境、交通控制对象特征和通信与实现手段的影响;进而面向多模式交通流,提出了以更安全、更快速、更绿色、更人性化等为基本特征的下一代智慧主动型交通控制系统及其逻辑架构与物理架构。系统原型测试表明,快速发展的信息通信等技术及基于此的下一代交通控制系统具有出色的潜在性能和广阔的前景。